Total overview
Individual sheets to send home to parents
I like to track the work that my students complete as we go so I can have an eye over everything and know what needs some focus. We use Hapara Workspaces as a whole school and the workspace itself creates a spreadsheet of the work on that particular workspace. I don't tend to use these as I like to have everything in one place for all my classes.
I list out all the tasks for a standard / project and then link the students work from the workspace. This spreadsheet is shared with the whole class so they can see where they are up to. As I get the links from the workspace, only the individual student and me has access to their work they can't see each other's work.
Link to copy of this year's spreadsheet (names have been removed). There are tabs along the bottom for all my senior classes.

To this end, a spreadsheet has been set up that includes all of the subjects, student names and the standards. Totals are kept and then we can see at a glance that all of our students are being offered enough credits in their courses.
Link to a copy of this spreadsheet (with the names and student details removed)


I have also just started tracking how many credits are being achieved by each student in graph from. There is not much there at the moment but this will give a visual guide as to how each course is going in terms of how many credits each student is achieving.

I am wanting to use the class blog so the students can analyse each others design work and they can give feedback to each other.
To get them comfortable with using the class blog for their work we have been uploading their work with description and explanations of what they have been doing - blog post here and blog post here
Next, we had a go at product analysis with structured questions - blog post here
This week we has our first go at analysing drawn designs for the seating project we are doing. I always do the work alongside the students as examples for them to understand what we are working on, so I used my design page for this first go at analysing designs so they felt ok about saying what they thought about it.
I put up my design page, with number on each design so they could decide which one they wanted to analyse. I also gave them a list of questions that they had to answer in the comment section of the blog post. I have colour coded the questions here to show how i use SOLO Taxonomy to structure the questions to have an increasing level of thought and depth.


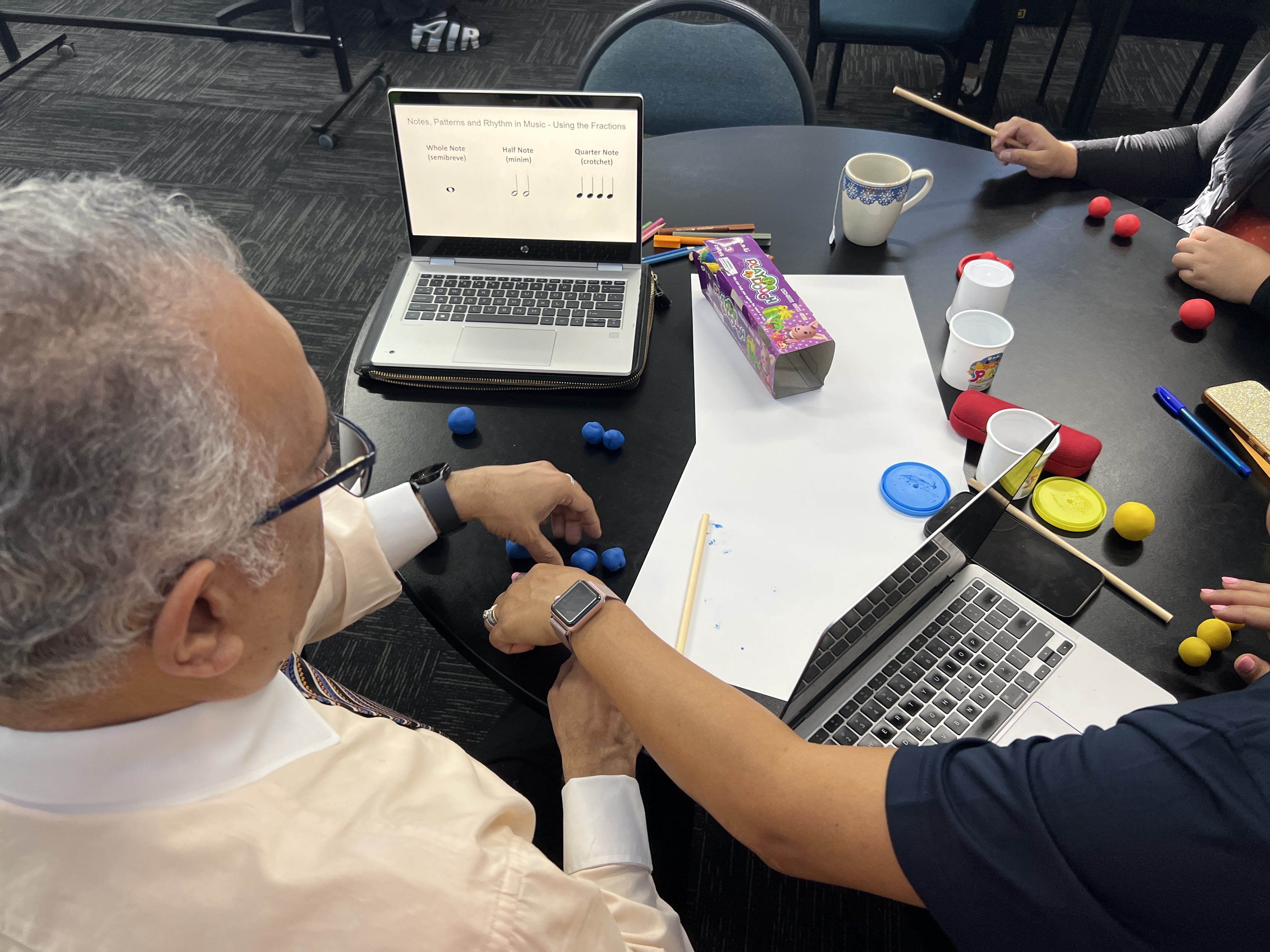
Each department is taking turns to present a PD session on a Monday morning. This week was the turn of the Creative Arts department. We decided to focus on Maths and specifically, rhythm and pattern in music, design and art.




Last year, with my Year 11 design students, we had a go at using AI to visualise the design developments in 3D to help with their development drawings. Blog post about it here.
This year, I want to start bringing it in a little earlier to help the students to visualise designs in 3D. I used Adobe Express and gave it the prompt to design outside seating for 4 people made from wood. I switched the prompt about a bit with garden seating, park seating to see what it came up with. I saved the ones I liked out as images. I then started putting up some inspiration images for style and composition. Playing around with both of these gave some interesting different options. Any that I found I liked, I saved as an image. There were lots that I didn't like and this took quite a bit of time, switching images in and out and changing the prompts.
I put the designs that I saved onto a Google Drawing, link here, with the inspiration images. These will be used as starting points for concept development drawings in 3D. It is a good way to see the 3D form and see how the light hits it with highlights and shadows.

In our PD sessions on Monday mornings, we have had 3 about literacy and how we can use graphic organisers to help students with understanding what they are reading. Session 1 , Session 2, Session 3.
I am a big fan of graphic organisers and have been using them for quite a while with my Year 11, 12 and 13 DVC classes. I am also a big fan of using SOLO taxonomy to structure support documents for students so any graphic organisers tend to use SOLO quite a lot. Link to recourses
Here are some examples of student work that has been done this term using graphic organisers. (I have made copies of them so the name of the student is removed)
Year 12 Examples
Compare and Contrast - this is the template that I give to the students to compare their chosen design era with another one.






My Year 11 DVC class are starting to do prodict analysis as part of their design project. In order for us to have some practice at doing this, I have decided to use the class blog so we all pratice analysing the same products while being able to see each others analysis. This is a follow on from when we used Google Plus communities to suport each others analysis work. Link to blog post here. I like to use SOLO to structure the questions as it builds up the complexity nicely.
We continued doing this as a class even when they stopped the communities. We sat around the front and did it all together on the TV screen.

My Year 12 and Year 13 DVC students had a great morning visiting the Yoobee open day seeing all the courses that they have on offer. This was a great chance for my students to see a wider variety of opportunities that are on offer if they want to continue with being creative after they leave school.
Link to Yoobee City Road campus It was very generous of them to allow us to bring 31 students.










After thinking about a variety of things that could be my inquiry focus this year - link to blog post here, I have decided that my focus will be on using a class blog as a means to give feedback to each other.
The group I will be using for this inquiry will be my Year 11 DVC class as this is my smallest class and we can work on critical thinking as they look at each others work and give structured feedback to each other.
So engaging in critical thinking is my focus with the use of the blog as the tool to do it.

As part of our first NCEA Level 1 Visual Art standard, my class had a visit to the Auckland Museum this week. This is part of our work on assessment standard AS91912 - Use practice-based visual inquiry to explore an Aotearoa New Zealand Māori context and another cultural context. Our theme for this standard is Taonga. In class we have looked at personal taonga and school taonga. This trip to the museum forms the basis for looking at New Zealand taonga. Link to my planning here.



My Year 11 class are looking at some of the design elements in the work of their chosen architect. The first one we are doing is form, where they have to make the forms they see in plasticine. We then take photographs of the models, print hem out and then draw from the photographs.
Link to my example - we include the photos, the drawings, descriptions of the drawings and photographs of the specific designs from the architect that were used as the influence. We are using Hapara workspaces to put together the work in one place.
Some of my students completed this work on form and have blogged about it before moving onto the next design element of pattern. I got them to include the page from their presentation and a description of what they had done.
Link to my example blog- I did an example blog with my work to show them how I wanted them to do it and what I wanted them to include.
Here are some of the blog posts about from form the class.
I have been in and put comments on the completed ones, again to give them an idea of writing a comment and giving feedback on each other's work. When the rest of the class has done their blog posts, we will have a session where we all go in and make comments on each other's blogs. I will be giving them guidelines on what to comment about. This will change on each blog post we do as the focus of the work will be different on each.
Comment Guidelines

This week I started blogging with my Year 11 Design and Visual Communication class. I decided to go with one blog for the class that they can all post onto rather than each working on individual blogs. I decided to do it this way as I was a big fan of my classes using Google Plus Communities, where we would post up class work and give each other feedback - link to blog label for Google Plus Communities. I want the blog to work in a similar manner, where we can see and comment on each others work and it is easy for everyone else to see too.
Matt Goodwin came to the class on Monday to help us get to know how to use Edublogs. Some of the students had used it in intermediate school and could remember, so to be honest, most of the help was for me! We leaned how to embed a Google document, a Google presentation and how to put in an image. These are the 3 things that we will be needing to put into our blog posts so it was good to get a chance to try all 3 of these methods.
I decided to try this with only my Year 11 DVC class at first, as this is my smallest class this year and it will be a good group to try this with. We will be working on Google docs, presentations and drawings and in our sketchbooks so it will give us chance to try out different ways of getting work onto our blogs.

This year, alongside my Level 1 Visual Art class, I have 1 Year 12 student doing Level 2 Visual Art / Painting. He is with me as he did not want to do sculpture, which is the focus of the other Visual Art teacher in the department. I taught this student last year when he did Level 1 Visual Art and I know that he is a very self motivated student so I thought that this situation, while not ideal, would be OK. This is my first time teaching Level 2 Visual Art so we are working through it together!
This is where my planning is up to so far. My student has chosen his two artist models and we are focusing on still Ife. To be honest, as this is my first time through this, I am leaning heavily on this resource form TKI.
We have looked at the NZQA exemplars - Link here
We have talked about choosing 2 artist models. One more traditional and one contemporary. Link here to the page on the class site.

As my Y12 student has been with my Year 11 class, we have all been doing media experiments to get us warmed up, so for painting, he has also been doing some copying of one of his chosen artists. He was introduced to water colours last year in Y11 and he loved them so he automatically went to that media choice to do his copy. Since then, I have bough some oil paints for him to try. He has had a firs try and I have put together some resources he can watch while he is practicing. Link here

Our nest step is to start analysis of the paintings of 2 artist models. This is stepping up from last year when we did AS91914 but we have to look at design elements a lot more and how they were used to create the narrative in the work. Link to the page on the class website

This is the template for the collection of the information. How this is presented is up to the student.




